
こんにちは。先日のロボットの話題に続いて、本日はロボット技術の話題となります。前回は、鉄筋の結束をするロボットでしたが、今回はコンクリートの床仕上げを効率化するロボットです。最近はロボットの開発も多いですね。
コンクリート床仕上げの省力化にもロボット活用

出典:大成建設
今回ご紹介する「コンクリート床仕上げロボット」ですが、大成建設さんと筑波大学さんの開発したものとなり、実は昨年に既に開発されていた「T-iROBO Slab Finisher」というコンクリート床仕上げロボットの機能を拡張し、半自律制御操作ができるように改良されたものになります。改良前ではオペレーター作業員が、常時ロボットの操作用コントローラーを握り操作していたということです。

出典:大成建設
従来の手作業の場合は、中腰体勢での作業となり大変そうですね…
繰り返し作業部分をロボットの自動運転で
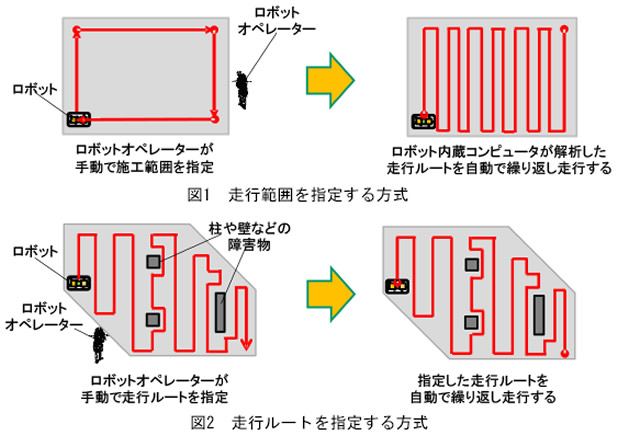
ロボットの走行範囲・走行ルートいずれかを選択し、繰り返し作業を事前指定することで自動運転をおこなうことが可能。それぞれの特徴は以下となります。
1.走行範囲を指定する方式の場合
まず初めにオペレーターがコントローラーでロボットを走行させて、施工範囲の指定をおこないます。範囲指定の後にロボットが内蔵しているコンピュータが、指定された範囲内の走行ルートを解析し、ロボットがそのルートを自動的に繰り返し走行。自動で床仕上げ作業をおこないます。この走行範囲を指定する方式の場合は、施工範囲の中に障害物がほとんどない平面形状の工場やオフィス等での床仕上げ作業に適しているといえます。
2.走行ルートを指定する方式の場合
こちらもまず初めにオペーレーターがコントローラーで操作。ロボットに走行ルートを指定します。2回目以降はロボットが自動的に走行し、そのルートを辿り繰り返し床仕上げ作業をおこないます。この走行ルート指定方式は、施工範囲内に障害物があり、それを回避しなければいけないような、複雑な平面形状の建物の地下部や倉庫などの床仕上げ作業に適しています。
出典:大成建設
どちらの方式に関しても、最初にオペレーターが施工範囲や走行ルートを指定するために操作をする必要はありますが、それ以降は自動で仕上げ作業をおこなうことが可能になるので、ずっと張り付いていなければならなかった頃に比べれば、かなりの効率化になっていると思われます。
ちなみに自動化する前のロボットの作業効率は、土間工による作業で土間工6名での手作業を1とした場合、2名のロボット操作作業で3~4倍になったということです。今回のこの自動化で、ある程度操作作業から開放されるので、さらなる作業効率の向上に繋がるでしょう。
欲を言えば完全に自動作業をおこなって欲しいところですが、それはまた今後の改良で実現することと思います。
◆製品のお問い合わせ:大成建設
◆お問い合わせフォーム