
株式会社鴻池組(以下、鴻池組)は、株式会社ポケット・クエリーズ(以下、ポケット・クエリーズ)と共同で、山岳トンネル工事の危険エリア観察における安全性向上を目的として、四足歩行ロボットの自律歩行による実証実験を2026年2月8日に実施。この実験により、危険エリアにおける無人探査、およびガス検知や点群データなどの環境情報の取得が可能であることを確認したというリリースニュースをお届けします。
危険エリアに進入する四足歩行ロボット

落石・有害ガスが潜む掘削現場へ単独で歩行・観察して帰還。
鴻池組×ポケット・クエリーズが実証実験に成功。
トンネル工事における危険性
山岳トンネル工事では地山の状態を把握・記録するため、掘削面の観察作業が不可欠です。
しかしこの作業は落石や崩落、可燃性ガスの湧出など、様々な危険が存在します。
鴻池組とポケット・クエリーズはこの課題に対して、作業員の安全性を確保しつつ正確に観察を行うため、四足歩行ロボットを用いた観察システムの開発に取り組んできました。
ロボットはどう動くのか──自律歩行のプロセス
はじめにトンネル掘削の最深部から手前約60m地点に設置された発進基地でロボットを起動し、以下の手順で観察を行います。
✅発進基地からスタート地点に移動し、周辺環境をスキャニングして自身と障害物の位置情報を三次元空間データとして記録
✅空間データを解析し、障害物を回避しながらトンネル先端方向へ自律歩行を開始
✅ロボットはあらかじめ設定した地点で自動停止し、掘削面の観察と環境データ収集を実施
✅観察とデータ収集を終えたのち、往路で記録した空間データを参照し、同一経路をたどって発進基地に帰還
発進基地は充電機能を備えており、観察作業の合間にロボットを充電することで継続的な運用を可能とします。
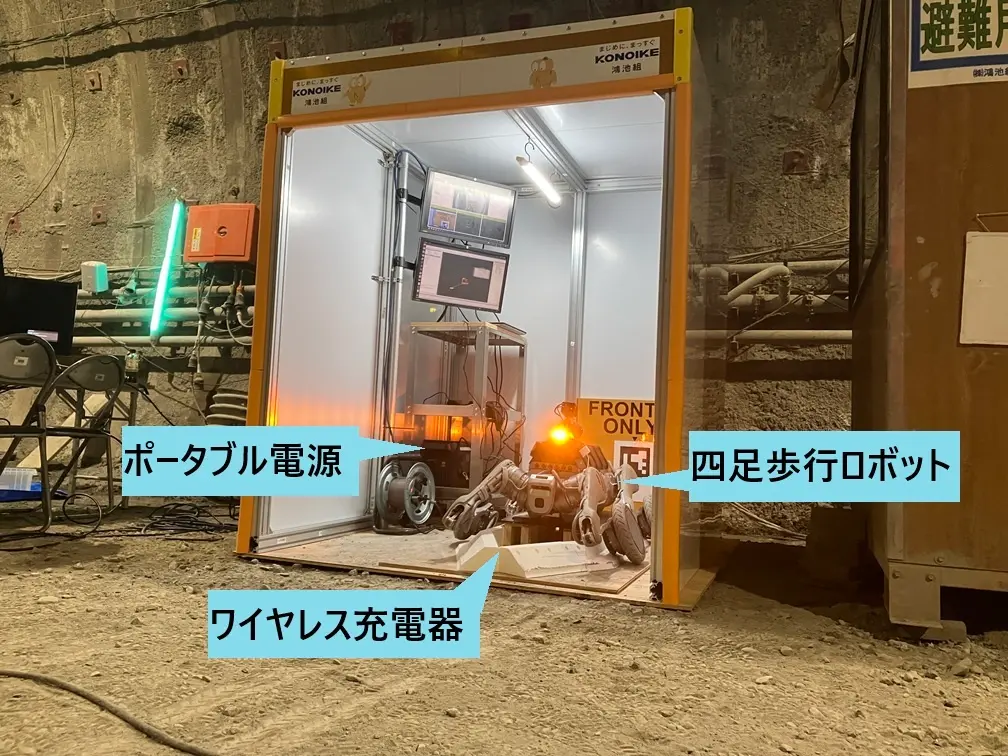
発進基地
搭載機器

四足歩行ロボット
実証実験では、Unitree社製の四足歩行ロボットB2-Wをベースに、周辺環境を検知することで自律歩行を可能とし、カメラによる遠隔での掘削面の観察、センサーによる環境モニタリングなどの機能を搭載しました。
センサーシステム
3DLiDAR(空間認識・三次元環境マッピング・障害物検知用) ガスセンサーおよび専用端末(CH4、O2、H2S、CO、CO2の検知・濃度測定用)
撮影・映像システム
ジンバルカメラ(高精度撮影用) POVカメラ(遠隔操作用映像撮影)
制御・処理システム
制御PC(各種センサーデータ統合処理・移動制御用)
通信システム
通信モジュール(遠隔操作・監視用) 無線LAN接続機能
安全・表示機器
フラッシュ表示灯(周囲への視認性向上用)
実験結果──精度と安全性の両立を確認
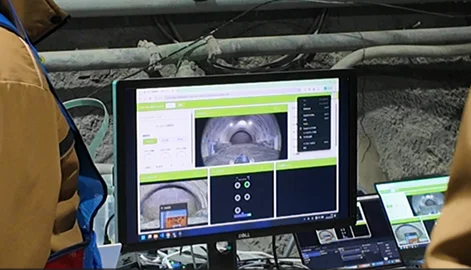
四足歩行ロボットから送信される観察データ
実験ではトンネル工事の最深部手前15m地点でロボットが停止するよう設定し、目標地点で停止後に掘削面の観察を実行しました。遠隔での観察により、風化変質や湧水の確認、ガス検知を行いました。データ収集後は往路と同一経路で帰還しました。
この結果から、従来の目視作業と同程度の精度を保ちつつ、作業員の安全性向上と総合的な環境評価が可能となりました。
今後の展望
今後は、地山崩壊時の調査などに対応するため、より複雑な地形条件での適用性検証や長時間運用時の安定性確保などの課題に取り組み、本システムの実用化を目指します。
鴻池組とポケット・クエリーズは、この取り組みを通じて、山岳トンネル工事の安全性と効率性の向上に貢献します。
資料引用:鴻池組
おわりに
テクノロジーの「適材適所」が、日本の建設DXを加速させる
今回ご紹介した鴻池組とポケット・クエリーズによる実証実験は、単に「ロボットがトンネルを歩いた」という成果以上に、これからの日本のものづくりや建設DX(デジタルトランスフォーメーション)が進むべき『ひとつの正解』を示しているように感じます。
ここで活躍した四足歩行ロボット「B2-W」を開発した中国のUnitree社は、いまや世界中の産業現場を席巻する存在です。
圧倒的な低価格と、過酷な環境に耐えるタフなハードウェア、そして世界中の開発者が自由にカスタマイズできるオープンさを武器に、驚異的なスピードで進化を続けています。
「なぜ日本の現場なのに、国産のロボットを使わないのか?」という疑問の声が上がったかもしれません。かつてロボット大国と呼ばれた日本には、川崎重工業の多脚ロボット「Bex」をはじめ、高い耐久性と職人技のような精密さを誇る素晴らしい技術が確かに存在します。
しかし、安全性や厳格な基準を重視するあまり、どうしても開発コストとスピードの面で海外勢に一日の長があるのが現状です。
では、日本のロボティクス技術の現在地は?
現代のロボットビジネスは、パソコンやスマートフォンと同じ構造になりつつあります。
Unitree社が提供しているのは、いわば高性能で安価な「最先端の土台(ハードウェア)」です。そこに、日本が世界に誇る「高度な環境センサー」や「ガス検知技術」、そして現場の声を反映した「緻密な自律巡回システム(ソフトウェア)」という命を吹き込むこと。
これこそが、現代における最強のチームアップなのです。
すべてを自前で開発することにこだわっていては、深刻化する労働力不足や、危険な現場の安全確保という「いま目の前にある課題」に間に合いません。
世界水準の優れたハードウェアを柔軟に取り入れ、そこに日本固有の課題を解決する知恵を掛け合わせる。この「テクノロジーの適材適所」こそが、これからのインフラの未来を守る鍵になるはずです。
「人の命を守るための危険な作業は、すべてロボットが肩代わりする」――そんなSFのような未来は、私たちのすぐ足元まで来ているのかもしれません。
最先端テクノロジーと日本の現場力が生み出す次なる一手に、今後も目が離せません。
【リリースニュース配信元】
□株式会社鴻池組
https://www.konoike.co.jp/news/2026/202605253553.html
□株式会社ポケット・クエリーズ
https://www.pocket-queries.co.jp/