
本日は株式会社人機一体(本社:滋賀県草津市、代表取締役:金岡博士、以下「人機一体」)が、
株式会社竹中土木(本社:東京都江東区、取締役社長:竹中 祥悟、以下「竹中土木」)と共同開発を進める、橋梁耐震補強用鋼製ブラケット(以下、鋼製ブラケット)取付ロボットの PoC(※1)試作機「人機スチュワートプラットフォーム ver.2.0(以下、人機 GSP ver.2.0 ※2)」を 2025 国際ロボット展へ出展というリリースニュースをおとどけします。
人機スチュワートプラットフォーム ver.2.0
スチュワートプラットフォームについては今年10月に開催されたハイウェイテクノフェア 2025に続く2度目の公開ですが、現場での実用を見据えたロボットシステム全体として、揚重機械(ラフテレーンクレーン)に取り付けた状態での初公開となります。
※1 PoC = Proof of Concept、概念実証
※2 GSP = スチュワートプラットフォームの英語表記、Gough-Stewart Platform の略称

人機スチュワートプラットフォーム ver.2.0
開発背景
資本提携と共同開発の開始
人機一体と竹中土木は、2022年12月に資本提携を実施しました。
さらに竹中土木が「ロボットが拓く、新たな土木」をコンセプトに、土木現場でのロボット適用に向けて、人機一体による知的財産活用サービス「人機プラットフォーム」の一つ「PF06 空間重作業人機社会実装プラットフォーム」に実用化企業として参画。
人機一体と竹中土木は「橋梁耐震補強用鋼製ブラケットの取付作業」の機械化を目指し、同プラットフォームにて共同開発を進めてまいりました。

橋梁耐震補強用鋼製ブラケット
従来工法の課題
橋梁の耐震補強工事で桁下に鋼製ブラケットなどの重量物を取り付ける際、クレーンで持ち上げられる高さには限界があり、チェーンブロックで吊り上げてボルト位置に合わせて微調整するといった一連の作業を手作業で行なう必要があります。
高所作業車上での人力作業のため、安全性の確保や作業効率の向上が長年の課題でした。

従来工法の流れ
2023国際ロボット展にて、ソリューションを提示(人機 GSP ver.1.3)
2023年11月の2023 国際ロボット展(iREX2023)にて、当時人機一体が独自に開発を行なっていた原理試作としてのPoC試作機「人機スチュワートプラットフォーム ver.1.3」を用いて、耐震補強ブラケットの取付作業を模したデモンストレーションを実施。木製のモックアップではあるものの、人による直感的な操作で、短時間で取付作業を実現できることを示しました。

iREX2023 での人機 GSP ver.1.3 における鋼製ブラケット取付作業デモンストレーション
実証試作機の概要(人機 GSP ver.2.0)
今回開発した人機 GSP ver.2.0 は、「ナット仮締結システム(ロボットアーム)」「ブラケット把持システム」「スチュワートプラットフォーム」から構成されており、クレーンなどの揚重機械のブーム先端に専用機械を用いて人機スチュワートプラットフォームを施工箇所まで接近しさせ、人機操作機から遠隔操作することでブラケットの位置・姿勢を自由自在に調整することができます。
従来工法ではブラケット一つあたり約120分要していたところを、スチュワートプラットフォームを用いる新工法により約30分まで削減することを見込んでいます。
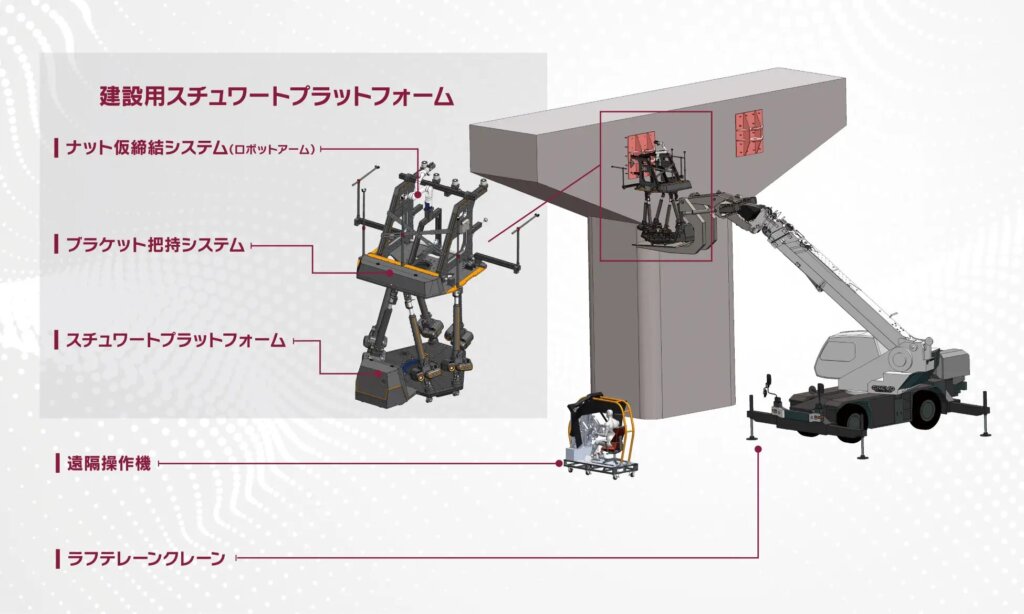
ロボットシステム全体

スチュワートプラットフォームを用いた新工法

作業時間の短縮効果
2025年10月のハイウェイテクノフェア2025 の竹中土木ブースにて「建設用スチュワートプラットフォーム」としてスチュワートプラットフォーム部分を初公開いたしました。
また現在は、ラフテレーンクレーンに搭載しての設置高約7mの場所への鋼製ブラケット取付作業の予備試験を進めております。

ハイウェイテクノフェア 2025 竹中土木ブースでの展示の様子

予備試験の様子
ナット仮締結システム(ロボットアーム)
パワー増幅バイラテラル制御による遠隔操作・力制御対応の7自由度ロボットアームを搭載。
先端の7軸目の無限回転を使用してブラケット取付後のナット仮締結を行ないます。
| 使用製品 | KINOVA Gen3 / 7DOF |
| 最大リーチ | 902 mm |
| 動作自由度 | 7自由度 |
| 重量 | 約 8.2 kg |
ブラケット把持システム
電磁石によりブラケットの吸着把持と取付後の解除を遠隔操作で行なうシステムを搭載。幅と奥行を任意に調整できる機構を採用し、多様な形状のブラケットにも対応できます。
| 寸法(カメラ部除く) | W 1,550 × D 1,650 × H 1,100 mm |
| 把持部寸法 | (最大)1,090 mm (最小)300 mm |
| ブラケット把持方式 | 電磁石による吸着 |
スチュワートプラットフォーム(GSP)
天板を支える6本のシリンダが相互に連携することで天板の三次元空間上での位置・姿勢を自在に制御できるロボットです。複数のシリンダで一つの天板を支えるシンプルな構造で、高出力かつ高精度な動きを実現。力と精度が同時に求められる重量物のハンドリングに適しています。
クレーンなどの揚重機械と組み合わせれば、スチュワートプラットフォームの弱点である可動範囲の狭さも解消され、汎用高所作業にも対応。建築・土木分野において、これまでは「吊り下げる」しかなかった重量物のハンドリングに、新たな「下から持ち上げる」ソリューションを提供します。
| 寸法(最小) | W 1,700 × D 2,010 × H 1,620 mm |
| 重量 | 約 700 kg |
| 可搬重量 | 1,000 kg(※ x, y = 500 mm オフセット時) |
| 可動範囲 | 取付方向 (x):± 700 mm(※ y = 0 mm, z = 100 mm 時) 取付方向 (y):± 700 mm(※ x = 0 mm, z = 100 mm 時) 取付方向 (z):+ 450 mm(※ x, y = 0 mm 時) |
| 電動シリンダ単体出力 | 19,600 N |
| 電動シリンダ単体ストローク | 500 mm |
iREX2025 での展示内容
人機一体ブースにて、人機 GSP ver.2.0 をタダノ製ラフテレーンクレーンのブームに搭載し、高所での鋼製ブラケット取付作業の実演および解説を実施します。
現場での実用を見据えたロボットシステム全体として、ラフテレーンクレーンに取り付けた状態での初公開となります。
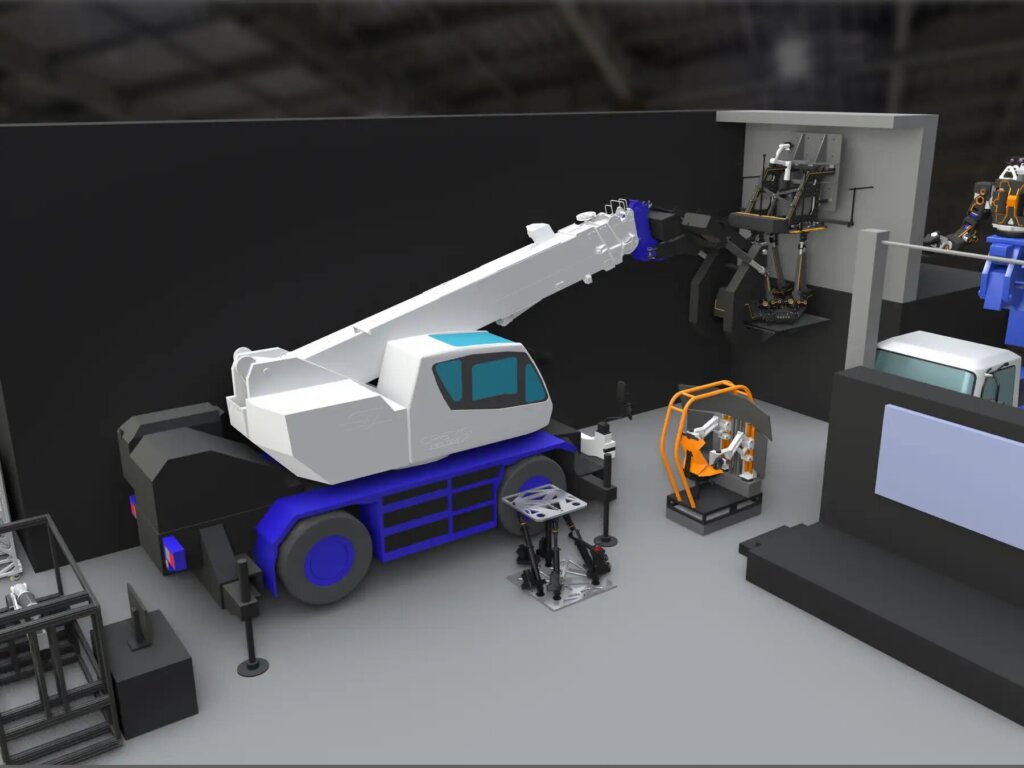
人機 GSP ver.2.0 iREX2025 での展示イメージ
※「人機 GSP ver.2.0」以外の iREX2025 展示内容については後日改めてお知らせします。
今後の展望
2026 年中を目標に、鋼製ブラケット取付作業の実現場での実証試験を目指し開発を進めています。
その後は、現場への社会実装へ向けて製品化企業の探索と連携を進めてまいります。
2025 国際ロボット展 (iREX2025)概要
| 会期 | 2025年12月3 日(水)〜 6 日(土) |
| 会場 | 東京ビッグサイト 東 4〜8 ホール、西 1〜4 ホール、アトリウム ※人機一体ブースは東 7 ホール内、E7-61 です。 |
| 主催 | 一般社団法人 日本ロボット工業会、日刊工業新聞社 |
⇒ 詳細は主催者サイトをご覧ください。
おわりに
このロボットの核心的な価値は、「クレーンで吊るす(不安定)」のではなく「ブームの先で下から支え、精密に位置決めする(安定・高剛性)」という点、そして「重量物を扱いながら、遠隔操作で力のフィードバック(バイラテラル制御)を感じて繊細な作業ができる」という点にあります。
これらを踏まえ、単なる「橋の補強」にとどまらない汎用的な利用案をいくつか考えてみました。
□トンネル・地下空間の天井補修・設備設置
橋梁の「下から持ち上げる」動作は、トンネル内での天井作業に最適です。
コンクリート剥落防止パネルの設置:
重量のあるパネルや補強シートを天井面に押し付けながら、ロボットアームでボルト固定やアンカー打ち込みを行う作業。
人間が上を向いて行う過酷な作業を代替できます。
大型ジェットファン(換気扇)の交換:
トンネル天井に設置される重量級のジェットファンを、下から精密に持ち上げて既存の金具にフィットさせる作業。
□大型建築物のカーテンウォール・ガラス取り付け
ビル建設において、外壁材や大型ガラスを設置する作業は風の影響を受けやすく危険です。
高層ビルのガラス施工:
クレーンで吊るすと風で回転してしまいますが、このロボットなら剛性を持って保持できるため、風のある高所でも「窓枠にピタリと合わせる」作業が可能になります。
オーバーハング部(軒下)への資材取り付け:
吊り荷ではアプローチしにくい、建物がせり出した部分の下側へのパネル取り付け作業に威力を発揮します。
□造船・航空機産業での船底・機体下部作業
巨大な構造物の「下側」に潜り込んで行う作業は、足場を組むのが大変であり、重力に逆らう作業となります。
船底のブロック溶接・塗装: ドック入りした船の下側から、重量のある溶接機材や塗装ロボットを押し当てて作業するプラットフォームとして利用。
航空機のエンジン着脱・脚部メンテナンス: 大型旅客機のエンジンやランディングギアのような重量部品を、下から支えて精密にボルト穴を合わせる作業。微調整(アライメント)機能が活きます。
□災害現場での「支保工(しほこう)」代用・救助支援
震災や事故で倒壊しかけた建物において、二次災害を防ぐための利用です。
瓦礫の緊急支え: 崩れそうな天井や壁を、このロボットで下から強力に支え(ジャッキアップし)、その間に救助隊が内部へ進入するルートを確保します。力制御ができるため、崩壊ギリギリのバランスを崩さずに支えることが可能です。
□プラント・発電所等の配管・バルブ交換
複雑に入り組んだ配管エリアでの重量物メンテナンスです。
高所配管のバルブ交換: クレーンのフックが届かないような配管の密集地帯でも、ブームを差し込んで下からバルブ(数百kg)を支え、ボルトを緩めて交換する作業を一貫して行えます。
まとめ 「逆転の発想」が生む汎用性
従来のクレーン作業は「上から吊る」のが常識でしたが、
このロボットは「クレーン車を使いながら、下から支える・押し付ける」という新しい作業スタイルを確立できるポテンシャルがあります。
特に、「1トンの重さを支えつつ、数ミリ単位で穴位置を合わせ、さらにネジを締める」という一連のプロセスは、建設・インフラだけでなく、
ロケット組立や災害対応など、あらゆる「極限環境での重量物ハンドリング」に応用できるのではないでしょうか。
【お問い合わせ先】
□株式会社人機一体
リリースニュース:https://www.jinki.jp/news/2025111901
□株式会社 竹中土木
https://www.takenaka-doboku.co.jp/